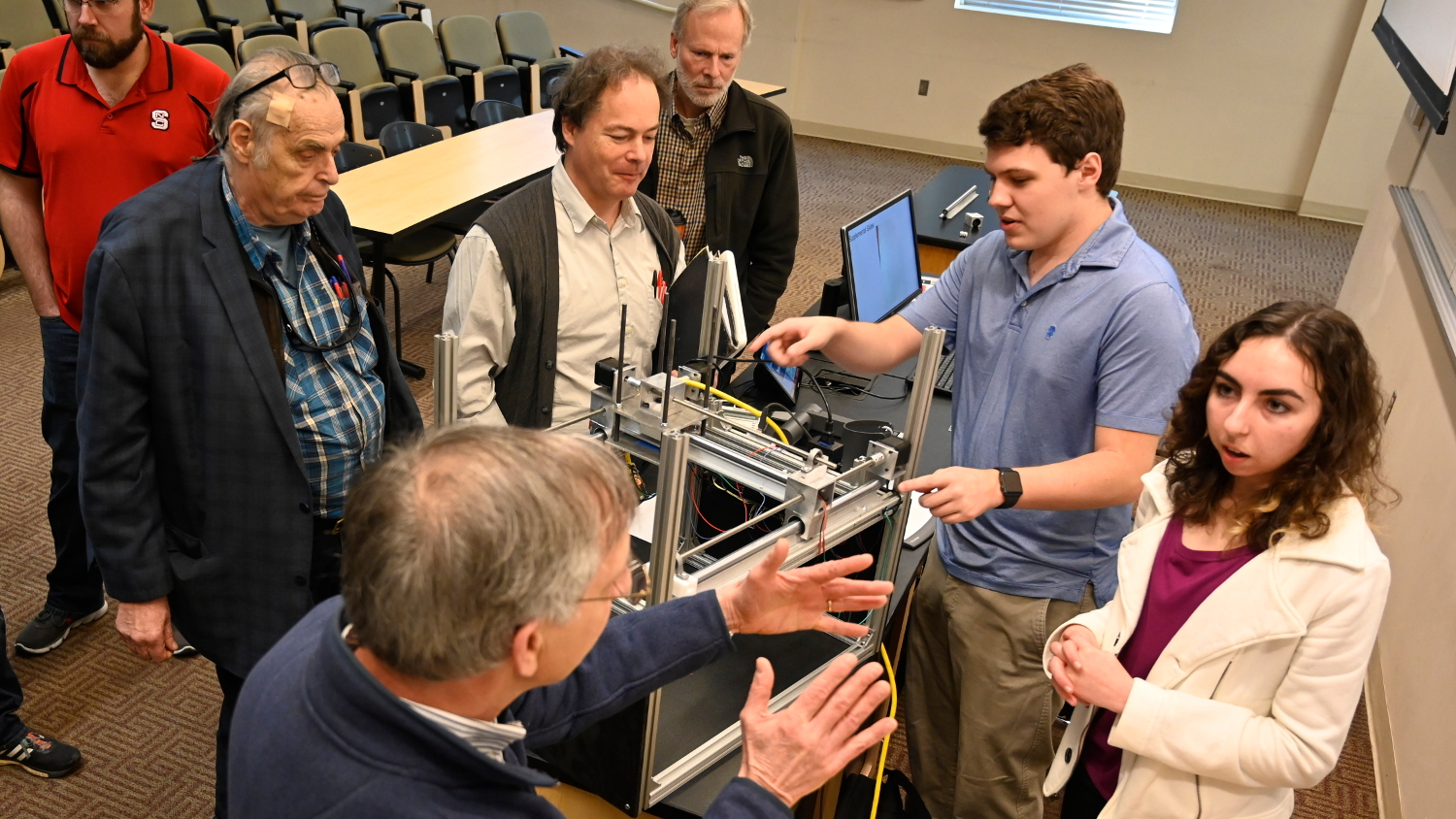



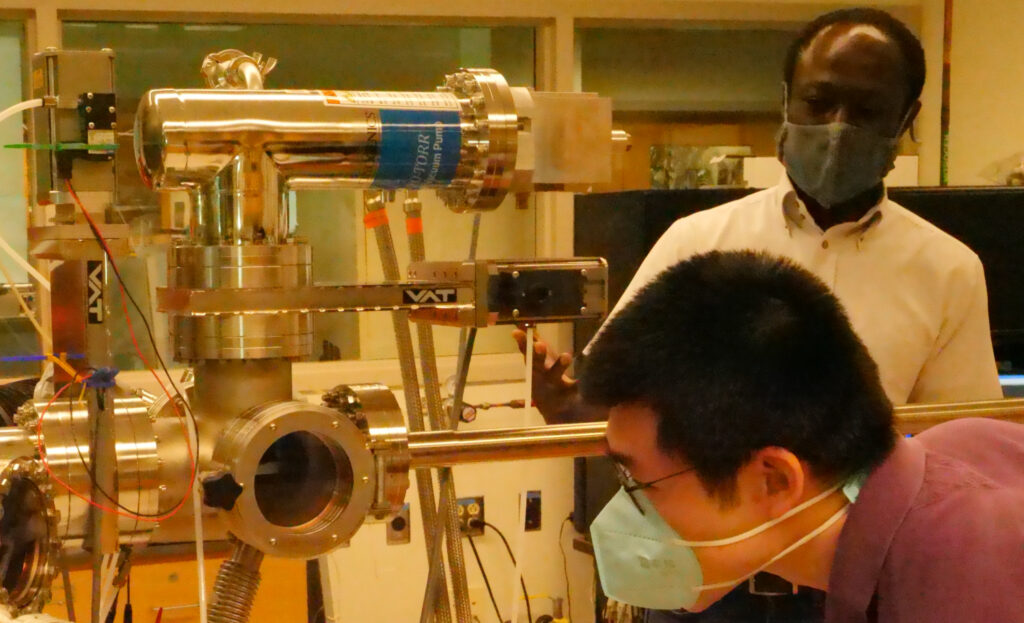
Extraordinary Research
8 AAAS Fellows
Our faculty includes eight fellows of the prestigious American Association for the Advancement of Science.
Join us for the colloquium today from 4-5pm in Riddick 301!! Dr. Stephen Roberson, from 4S Silversword Software and Services, and president of the National Society of Black Physicists @NSBPInc, will discuss "Navigating the Backlash of Anti-DEI Sentiment".
https://physics.sciences.ncsu.edu/event/physics-colloquium-stephen-roberson/
Join the colloquium today from 4-5pm in Riddick 301! Dr. Saori Pastore, from Washington University St. Louis will discuss "Fundamental Physics with Nuclei"! | More info:
https://physics.sciences.ncsu.edu/event/physics-colloquium-saori-pastore-a/
Don’t miss out on the colloquium today from 4-5pm in Riddick 301!! Dr. Binghai Yan, from Weizmann Institute of Science, will discuss "Topology, Spin and Orbital in DNA-like Chiral Quantum Materials". | More info:
https://physics.sciences.ncsu.edu/event/physics-colloquium-binghai-yan/
